矩阵相乘CPU版本
思路:三重循环,
- 外层:遍历结果矩阵所有行,
- 中层:对结果矩阵每一行,遍历所有列,
- 内层:结果矩阵某一行某一列元素的得到,需要A矩阵对应行,B矩阵对应列,的元素相乘后累加,这需要一个循环。内层循环结束后,就得到结果矩阵中的一个元素。
看图:
实现:
1 | void matrixMultiplicationCPU(float* M, float* N, float* P, |
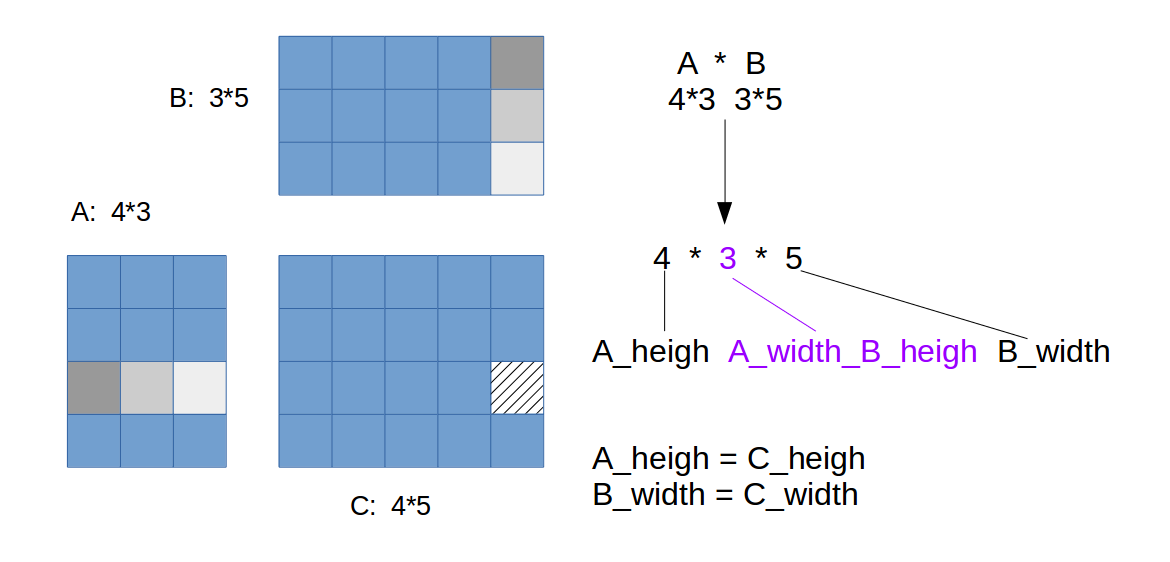
其中,M的大小为(A_height x Awidth_Bheight),N的大小为(Awidth_Bheight x B_width). 注意中括号内,索引的计算。
未优化的矩阵相乘kernel
参数:
- AColBRow:AxB中A的列数,也是B的行数
- BCol:B的列数
- a,b矩阵的元素索引按行标注索引
1 | __global__ void simpleMultiply2(float *a, float* b, float *c){ |
这种方法中每一个线程负责乘累加结果的一个元素,这个元素的得到是通过循环读取a矩阵的一行,b矩阵的一列,后乘累加得到。这个过程其实就是把CPU版本中的外循环和中层循环去掉,替代这两个循环的是threadIdx.x和threadIdx.y,这两个值自加。对于a和b的访存索引的计算是不变的。因为不涉及到结果间的依赖,所以不需要同步机制。
缺点:
- 观察
row和col的定义,发现这个实现只使用了一个block。对于大的矩阵相乘,一个block不足以覆盖所有元素。 - 矩阵相乘的过程中,同一个Global memory地址被频繁访问,所以速度慢。
多blocks分块处理矩阵相乘
参数:
- AColBRow:AxB中A的列数,也是B的行数
- BCol:B的列数
- a,b矩阵的元素索引按行标注索引
1 | __global__ void simpleMultiply2(float *a, float* b, float *c){ |
此情况的线程结构是2D block,2D thread,注意线程组织的index,事实上是这样的:
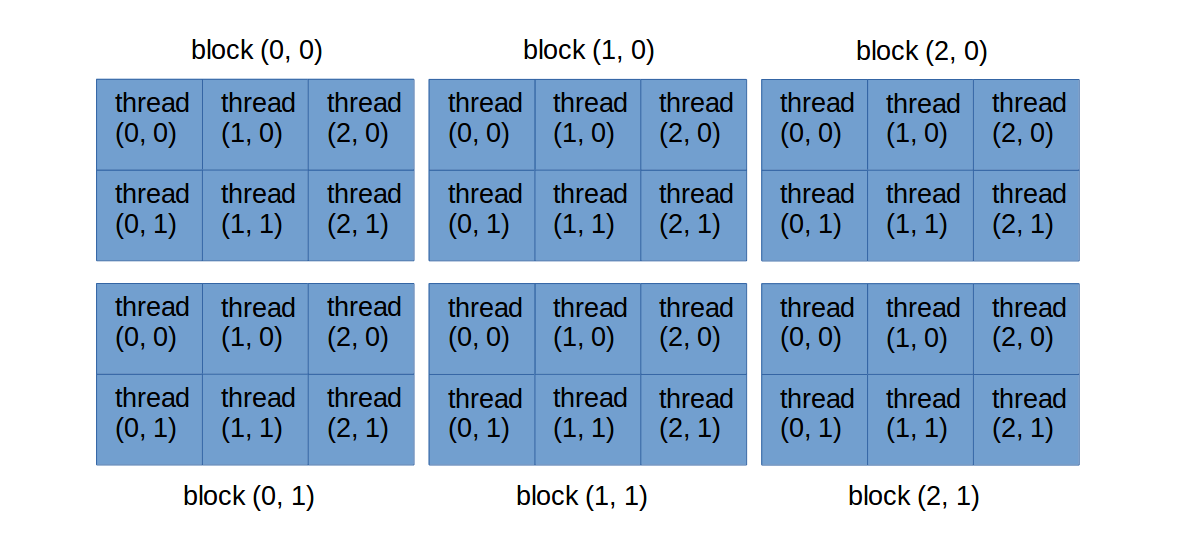
注意:横向,index的第一个分量递增;纵向,index的第二个分量递增。
与上一种方法相比,优势是,使用多个blocks,每个block负责结果矩阵中的一个矩形块中的元素。
每个thread的操作细节看下图:
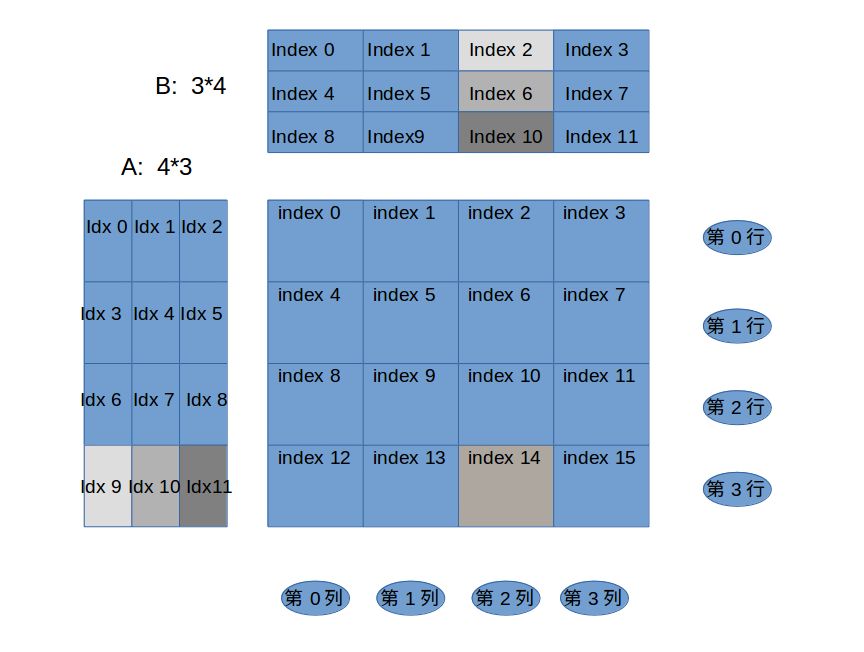
注意,C/C++中矩阵元素是按行排列的。假设线程组织是2D thread 2D block,假设tile大小是2x2的,假设使用4个blocks。那么跟踪上述code可得到结果矩阵中的第14个元素:
1 | row = 3; |
看出逻辑及结果是正确的。
有了kernel,如何调用kernel:
1 | // block的个数 |
比如图中
- 定义tileRow=2,tileCol=2.
- A的行数为ARow=4,列数ACol=3;
- B的行数为BRow=3,列数BCol=4;
那么,有如下对kernel的配置,自然地每个tile的大小为2x2,每个block大的大小也是2x2. block与block之间相互不影响,所以所有blocks并行执行。
1 | // block的个数,共有4个 |
其中tile是一个block处理区域的大小,也就是一个block的大小,比如2x2,3x4. 是开发者根据问题情况自己定义的(通常是32 的倍数)。通过结果矩阵的行列数和tile的行列数,可以计算出,所需block数量个blocks阵大小。
总结:这个优化算然可以处理任何大小的矩阵相乘,但是对global memory的读写并没有做优化。
Global memory慢
假如一个GPU的性能峰值时346.5 Gflops。所以需要346.5x4bit=1386 GB/s的带宽才能达到峰值。但是这个GPU的存储实际带宽可能只有86.4GB/s,也就是86.4GB/s / 4bit=21.6 Gflops的性能。而实际上代码运行的速度可能只有15 Gflops。只有峰值的1/20. 所以要尽量减少对global memory的访存。
对于矩阵相乘,可以使用shared memory来减少对global memory的访存。始终要有这个意识。
优化实列:使用shared memory优化矩阵相乘
Shared memory这么使用:
思路:
因为使用了若干个block来分块结果矩阵,每一个block有自己单独的shared memory,这个存储空间由这个block内的所有threads共享,而且就矩阵相乘这个问题,A矩阵的每一行,和B矩阵的每一列在计算这个块时会不止一次被使用。所以:
- 将结果阵中这一块对应的A中行和B中列存入这个block对应的shared memory中,如此避免了对global memory的频繁访问。如下图:
- 进一步,由于A和B会很大,存入shared memory中的A行,和B列也是分段的,避免了shared memory不够用。如下图:
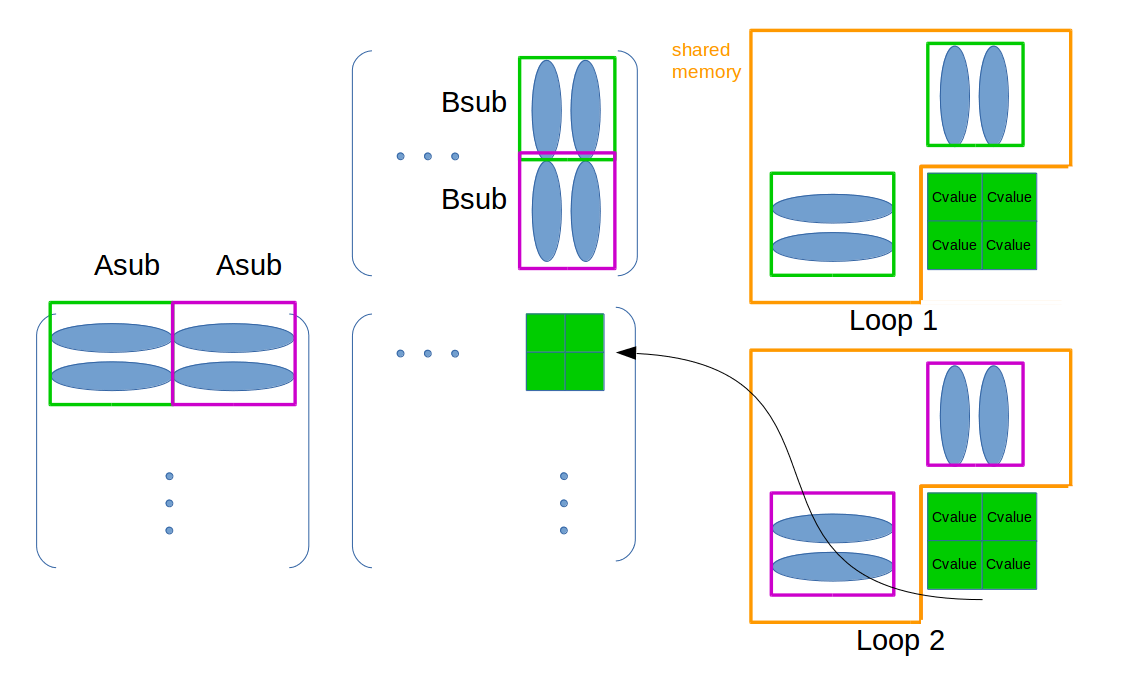
其中橘色是这个block的Shared memory空间,循环所有的Asub和Bsub,先绿色后紫色,将每次的元素放入Shared memory,求得结果累加到Cvalue。循环结束后将最终的Cvalue写入最终位置,见图中箭头,
kernel函数包含二重循环:
- 外层,循环所有的Asub和Bsub,并将其放入Shared memory中。
- 内层,循环求Asub每部分行和Bsub每部分列的部分乘累加和Cvalue。
Bare in mind,每一个thread处理一个结果阵中的一个元素,也就是说,kernel函数是一个thread得到一个结果矩阵中的一个元素。
官方文档中有官方的解释,可以参考。
注意,整个过程中有两处同步操作,因为涉及到线程间的同步。
程序如下:
1 | __global__ void MatMulKernel(Matrix A, Matrix B, Matrix C) |
那么对global memory 的访问减少了多少倍呢?
- 假如一个block计算
2x2的结果C的子矩阵,那么未优化的实现要访问Global memory(2*2*2)8次行/列(定义1次行/列:访问A的完整一行或B的完整一列)。优化后只访问4次行/列。8/4=2,就是tile的宽。 - 假如一个block计算
3x3的结果C的子矩阵,那么未优化的实现要访问Global memory(2*3*3)18次行/列。优化后只访问6次行/列。18/6=3,就是tile的宽。 - 假如一个block计算
100x100的结果C的子矩阵,那么未优化的实现要访问Global memory(2*100*100)20,000次行/列。优化后只访问200次行/列。20,000/200=100,就是tile的宽。
所以对于很大的矩阵,优化前后的性能差别是巨大的。相差tile宽,这么多倍。
相差tile宽,这么多倍。极限情况下,如果shared memory有足够的空间,可以把A,B都放入每个block的shared memory中。此情况下对global memory的访问最少。
上述优化方法中确定块tile的宽度要考虑shared memory的大小:
尽量最大化tile,block的大小
假如一个GPU每个SM有16kB的shared memory,并且每个SM有8个blocks。可以算出每个block可以使用2kB的shared memory。
其中1kB存矩阵A的相关元素,1kB存B的相关元素。假设数据类型是float,占4B。所以可以计算出1kB=16x16x4。block的大小为16x16. 也就是一个block有16x16个threads。
这种情况充分使用了SM的threads和shared memory资源,最大化资源占用率。