循环展开
循环展开减少了循环中的变量的判断,自加等其他操作,是提升性能一个手段。
1
2
3
| for (int i=0; i<1000; i++){
a[i] = b[i] + c[i];
}
|
将循环次数减少一半:
1
2
3
4
| for (int i=0; i<1000; i+=2){
a[i] = b[i] + c[i];
a[i+1] = b[i+1] + c[i+1];
}
|
下面的两段规约法,展示使用完全的循环展开。
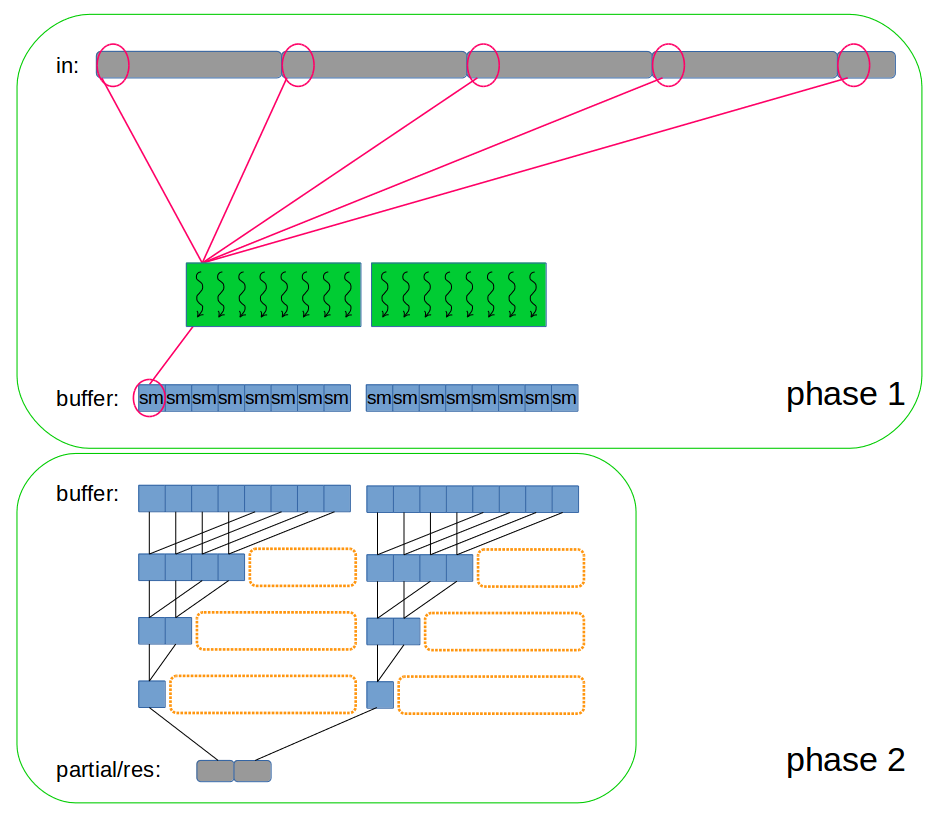
再看规约-两段规约
类似与点积中的两段法。两段规约同样使用shared memory。
过程见下图:
实现上图过程:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
|
__global__ void reductionKernel(int* out, int* in, size_t N){
__shared__ int buffer[];
int sum=0;
int tid = threadIdx.x + blockDim.x * blockIdx.x;
int stride = blockDim.x * gridDim.x;
for (size_t i = tid; i<N; i+=stride){
sum += in[i];
}
buffer[threadIdx.x] = sum;
__syncthreads();
for (int i = blockDim.x >> 1; i!=0; i>>=1){
if (threadIdx.x < i){
buffer[threadIdx.x] += buffer[threadIdx.x + i];
}
__syncthreads();
}
if (threadIdx.x == 0)
out[blockIdx.x] = buffer[0];
}
|
分析说明:
- 强调:第一阶段的blockDim.x应该是32的倍数,每个block对应的Shared memory大小也要是32的倍数。这样才能保证在第二阶段所处理的数据是整齐的。
- 第二阶段结束后block与block间结果怎样同步?kernel函数执行完毕,表示两个block都得到了结果,即同步了。所以一种方式的到最终结果是两次调用这个kernel函数。见下面code。
- 对out数组的最终处理,可以考虑将out传回host后在CPU中计算,就像
向量点积。也可以使用一个block,第二次调用上述kernel函数,得到最终值。(我感觉不如传回CPU)。
- shared memory 的访问索引是
threadIdx.x。因为一个block共用一段Shared memory,所以Shared memory的不同地址可用这个block的threadIdx.x唯一标识。
- 使用
blockDim.x >> 1和i>>=1,这属于指令优化。
- kernel中的Shared memory可以不分配大小,调用kernel函数时再指定大小。
在Host中调用kernel函数:
1
2
3
4
5
6
7
8
9
10
11
12
| void reduction(int* res, int* partial, int* in,
size_t N, int numBlocks, int numThreads){
int sharedSize = numThreads*sizeof(int);
reductionKernel<<<numBlocks, numThreads, sharedSize>>>
(partial, in, N);
reductionKernel<<<1, numThreads, sharedSize>>>
(res, partial, numBlocks);
}
|
看到了吧:
- block间的同步,其实是当该kernel函数执行结束后,自动同步。
- 第二次调用相同的kernel,只使一个block。
- 注意:此处在
<< , , >>>中出现了第三个参数,由于在kernel中,没有指定shared memory的大小,所以在调用kernel函数时要制定大小了。
- 这个kernel中的第二个for循环中,循环的之后阶段,当threads数小于等于
32时,可以特殊处理,此时的所有活动threads在一个warp中,所以不需要同步。细节间32特殊处理规约。
- 补充:每个block中的warp时按照lockstep的方式执行每条指令。
再看规约-第二阶段循环展开
优化意识:当threads数小于等于32时,也就是threadIdx.x从0到31时,可以特殊处理。这种处理就是循环展开。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
|
__global__ void reductionKernel(int* out, int* in, size_t N){
__shared__ int buffer[];
int sum=0;
int tid = threadIdx.x + blockDim.x * blockIdx.x;
int stride = blockDim.x * gridDim.x;
for (size_t i = tid; i<N; i+=stride){
sum += in[i];
}
buffer[threadIdx.x] = sum;
__syncthreads();
for (int i = blockDim.x >> 1; i>32; i>>=1){
if (threadIdx.x < i){
buffer[threadIdx.x] += buffer[threadIdx.x + i];
}
__syncthreads();
}
if(threadIdx.x < 32){
volatile int* wsSum = buffer;
if(blockDim.x > 32)
wsSum[threadIdx.x] += wsSum[threadIdx.x + 32];
wsSum[threadIdx.x] += wsSum[threadIdx.x + 16];
wsSum[threadIdx.x] += wsSum[threadIdx.x + 8];
wsSum[threadIdx.x] += wsSum[threadIdx.x + 4];
wsSum[threadIdx.x] += wsSum[threadIdx.x + 2];
wsSum[threadIdx.x] += wsSum[threadIdx.x + 1];
if (threadIdx.x == 0){
volatile int* wsSum = buffer;
out[blockIdx.x] = wsSum[0];
}
}
}
|
注意:当编写warp同步的code时,必须对shared memory 的指针使用volatile关键字。这个关键字告诉编译器必须将wsSum[threadIdx.x]的值存回global中。如果没有volatile,为什么不能得到正确结果?
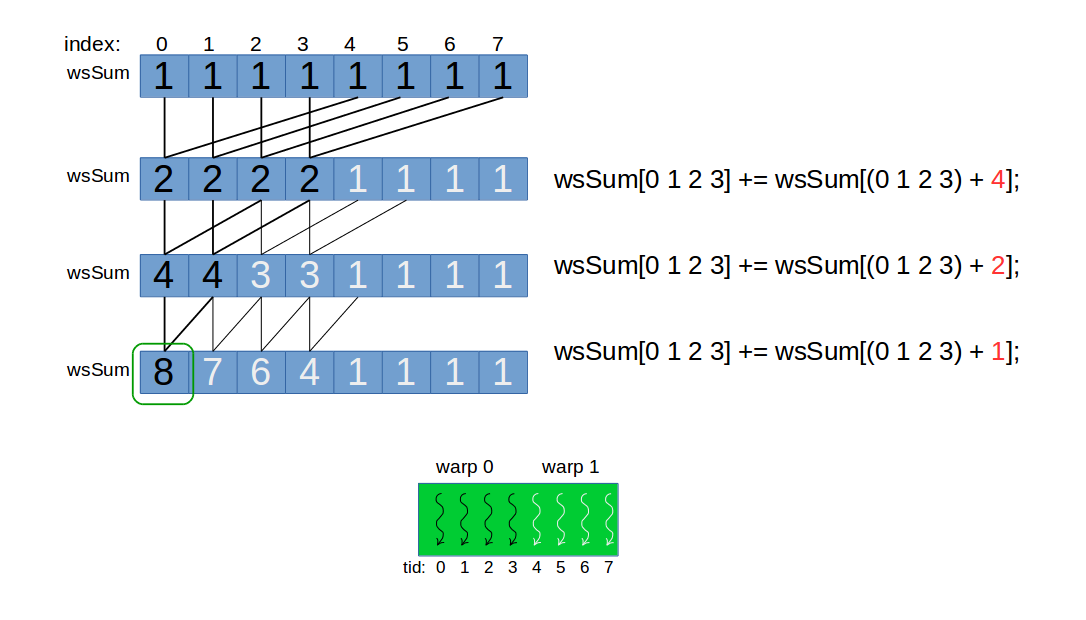
第三步为什么正确,看下图之前,假设:
- 下图将大小为32的warp假设为4,即
warp size=4:
- 所展示的情况是从上一个图片中的第一阶段的结果开始,即
blockDim.x=8.
对于code中的第三步,见下图:
从上述code第二阶段的循环开始:
1
2
3
4
5
6
7
8
9
| blockDim.x=8;
for(i=8>>1; i>4; i>>=1){
i=4, i!>4, 退出循环;
}
对于 threadIdx.x<4,blockDim.x>4,即 0 1 2 3. 执行下面操作:
wsSum[0 1 2 3] += wsSum[(0 1 2 3) + 4];
wsSum[0 1 2 3] += wsSum[(0 1 2 3) + 2];
wsSum[0 1 2 3] += wsSum[(0 1 2 3) + 1];
|
说明:
- 其中执行单元只有这个block 中的第一个warp。
- 最终需要的是每个block对应buffer是第一个值,所以除第一个位置以外的位置,其值是无意义的。但是由于warp中的线程执行相同的指令,所以warp中其他threads也工作了,只不过这些结果我并不需要。
- 再强调:第一阶段的blockDim.x应该是32的倍数,每个block对应的Shared memory大小也要是32的倍数。这样才能保证在第二阶段所处理的数据是整齐的。
再次证明,用假设小的数值,用小的例子,小的数据有助于理解,
再看规约-第二阶段进一步循环展开
使用template把上述实现的第二阶段的for循环,做循环展开,这个展开是完全的展开。思路与上述实现一样,warp同步的优化方案就更近一步了。code如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
| template<int threadsPerBlock>
__global__ void reductionKernel(int* in, int* out, size_t N){
__shared__ int buffer[];
int tid = threadIdx.x;
int sum = 0;
int id = tid + threadsPerBlock * blockIdx.x;
int stride = threadsPerBlock * gridDim.x;
for (size_t i = id; i< N; i += stride){
sum += in[i];
}
buffer[tid] = sum;
__syncthreads();
if(threadsPerBlock >= 1024){
if(tid < 512)
buffer[tid] += buffer[tid + 512];
__syncthreads();
}
if(threadsPerBlock >= 512){
if(tid < 256)
buffer[tid] += buffer[tid + 256];
__syncthreads();
}
if(threadsPerBlock >= 256){
if(tid < 128)
buffer[tid] += buffer[tid + 128];
__syncthreads();
}
if(threadsPerBlock >= 128){
if(tid < 64)
buffer[tid] += buffer[tid + 64];
__syncthreads();
}
if( tid<32 ){
volatile int* wsSum = buffer;
if (threadsPerBlock >= 64) wsSum[tid] += wsSum[tid + 32];
if (threadsPerBlock >= 32) wsSum[tid] += wsSum[tid + 16];
if (threadsPerBlock >= 16) wsSum[tid] += wsSum[tid + 8];
if (threadsPerBlock >= 8) wsSum[tid] += wsSum[tid + 4];
if (threadsPerBlock >= 4) wsSum[tid] += wsSum[tid + 2];
if (threadsPerBlock >= 2) wsSum[tid] += wsSum[tid + 1];
if (tid == 0) out[blockIdx.x] = wsSum[0];
}
}
|
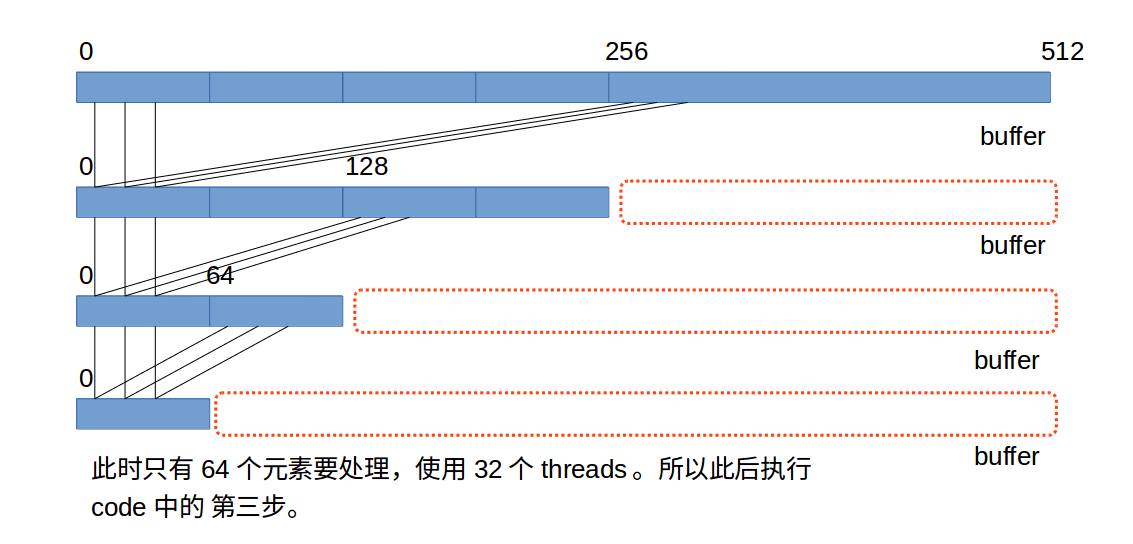
完全展开, 避免了循环控制的开销,第三步的展开还避免了thread同步的逻辑。
这里的执行有个特点,看if判断中的数字:1024,512,256,128,64,32,16,8,4,2,1,从逻辑看,一定是从大到小排列的,而且执行的时候,如果有一个if满足,那么这个if及其之后的if语句都会被执行。过程看下图。
第三次强调:第一阶段的blockDim.x应该是32的倍数,每个block对应的Shared memory大小也要是32的倍数。这样才能保证在第二阶段所处理的数据是整齐的。
所以设threadPerBLock为512时的示意图如下:
第三步中,不需要__syncthreads(),一个warp中的threads天然同步。
这个kernel是个模板kernel,在被host函数调用时,要指定threadsPerBlock的值。
调用kernel的host函数也必须是一个模板函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
| template<int threadsPerBlock>
void callReduction(int* res, int* partial,
int* in, size_t N,
int numBlocks){
reductionKernel<numBlocks><<<numBlocks,
threadsPerBlocks,
threadsPerBlocks*sizeof(int)
>>>(partial, in, N);
reductionKernel<numBlocks><<<1,
threadsPerBlocks,
threadsPerBlocks*sizeof(int)
>>>(res, partial, numBlocks);
}
void func(int* out, int* partial,
int* in, size_t N,
int numBlocks, int threadsPerBlock){
switch( theadsPerBlock ){
case 1: return callReduction< 1 >(...);
case 2: return callReduction< 2 >(...);
case 4: return callReduction< 4 >(...);
case 8: return callReduction< 8 >(...);
case 16: return callReduction< 16 >(...);
case 32: return callReduction< 32 >(...);
case 64: return callReduction< 64 >(...);
case 128: return callReduction< 128 >(...);
case 256: return callReduction< 256 >(...);
case 512: return callReduction< 512 >(...);
case 1024: return callReduction< 1024 >(...);
}
}
|
之所以不能在一个kernel中获得最后结果,是因为,block与block之间是没有同步的。而第二阶段的规约需要所有block的buffer中第一个值,集合在一起,作为前提,如第一幅图所示。可不可以只一阶段就完成任务呢。