卷积操作应用于许多领域,而其特点:计算量大,每个输出元素的计算都是相互独立的。这两个特点是并行计算期望处理的。卷积中对于边界的处理影响着分块算法的效率。
一维卷积基本形式
假设一维数组N是被操作对象,一维数组M是卷积核,一维数组P为卷积结果。假如对于边界元素(幽灵元素)的处理是赋值为0,也就是说幽灵元素与对应的M元素的乘积为0.
若每个thread负责P数组中的一个元素,那么一维卷积的基本形式如下图:
一个thread得到结果数组P中一个元素。实现:
1 | __global__ void conv1D(float* N, float* M, float* P, |
一般卷积核的长度是奇数,这样计算过程是对称的。
上述实现的缺点:
- 代码中这句
Pvalue += N[start + j] * M[j]包含两次对Global 的访存,和两次算术运算(一个乘法,一个加法)。运算访存比仅为1.0。性能有限。 - 对边界的处理出现Divergence。
Constant Memory优化的一维卷积
卷积操作有三个特点:
- 考虑到卷积计算的过程,以及实际中的卷积操作,比如在Google Inception Net分组卷积,MobileNet深度可分离卷积,ResNet中的残差学习单元,中的描述,卷积核大小都是3x3, 1x1, 1x7, 7x1,5x5很小的卷积核。
- 卷积核的内容是不变的。
- 所有的threads都访问卷积核(假设就一个卷积核),并且访问卷积核中元素的顺序是一样的。
根据这些特点结合Ray-Tracing这篇笔记中Constant Memory
描述的Constant Memory的特性。考虑将卷积核放入Constant Memory。
这里补充一点,Constant Memory中的内容对于所有Blocks可见。使用.totalConstMem可以查询其大小。
与Ray-Tracing中的使用一样:
1 |
|
kernel函数与基本形式一样,除了参数列表中不需要再传入卷积核数组M。
虽然Constant Memory在Global中,但是cuda知道Constant Memory中的内容是不变的。所以直接将其放入高速缓存中(L1缓存)。
补充:
高速缓存的层次结构。从DRAM中访问一个变量需要数百上千个时钟周期,而且处理器处理数据要比访存快得多。DRAM的长延迟和有限带宽成了现代处理器的性能瓶颈,称为存储器墙。现在的处理器都会有片内的高速缓存,来减少DRAM的访存次数。
缓存一致性:
使用高速缓存的一个重要设计问题是缓存一致性,当一个或多个处理器核心试图修改缓存中的数据时,问题出现了。每一个处理器核心有自己的L1缓存,如果这个被修改了,而其他核心的L1缓存不变,缓存中的内容就不一致了。在并行处理器中处理缓存一致性开销很大(就相当于实现全局线程同步开销很大一样)。所以GPU中没有缓存一致性的机制。
将Constant memory放到L1高速缓存中。WHY
- Constant memory中的内容在kernel执行期间不会被改变,因此没有缓存一致性的问题干扰。所以硬件可以直接将Constant memory放到L1高速缓存中。
- 在处理器的缓存设计中通常优化了线程的广播。所以当一个warp中的线程访问同一个Constant memory中的(相同的)变量时,高速缓存能为threads所需要的数据提供巨大的带宽。
Shared memory优化的分块并行卷积
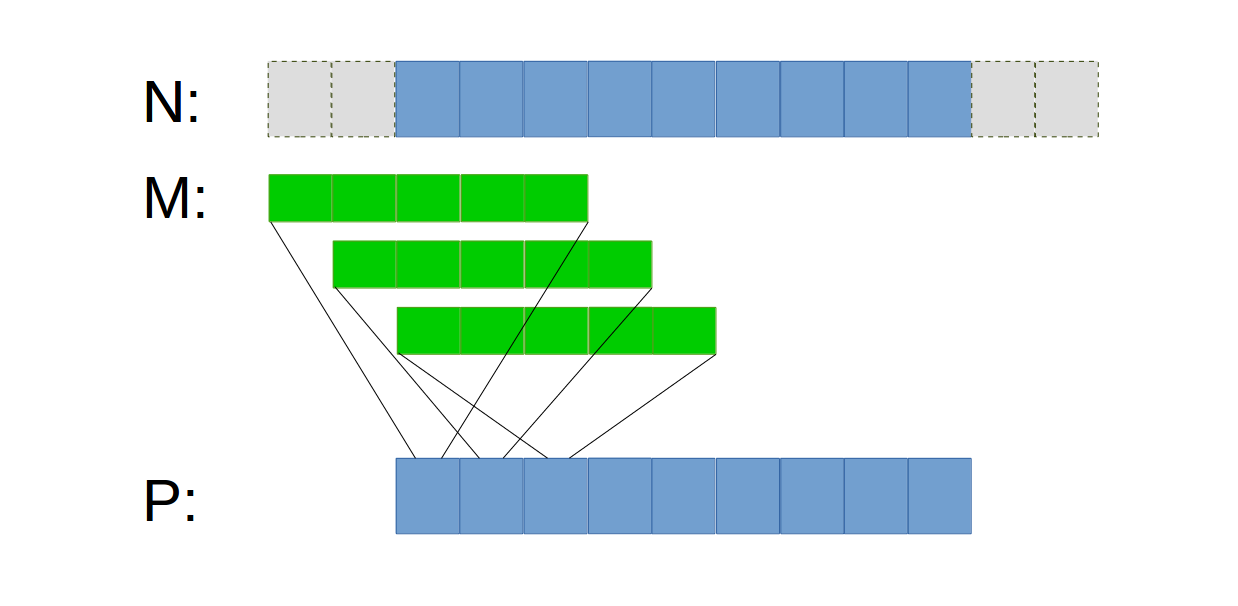
分析卷积过程,以一维卷积为例,假设卷积核的长度是5,N(Global)中有100个元素,其中每一个元素要平均被访问5次,那么就需要500次的Global memory的访存。显然,N中每个元素被重复访问了。所以考虑是用分块Shared memory来降低Global的访存。
假设N长度为15,M长度为5,block大小为4,Shared memory大小为4,输出到P。过程如下图:
<>pic2<>

每一个thread处理一个P中元素,对于每一个block,分两步操作:
- 将数据从N中写入blocks对应的Shared 中。
- 执行卷积计算。
而读入Shared的操作分为左中右,三部分
实现:
1 |
|
L2缓存了的分块并行卷积
新知
上个实现的代码复杂度集中在了将左右元素加载到Shared 中,注意,一个block的左右元素,同时又是相邻block的内部元素,因此很有可能在block #1需要这些左右元素时,它们已经由于block #2的访问而存储到了L2缓存上。这样对于左右元素的访问从代码上是访问了global,实际上却是转化为对L2缓存的访问。依然达到减少Global访存的目的。看下图:
<>pic3<> 图8-10
如此一来,shared memory 的大小变成如下,与block的大小一致了:
1 | __shared__ float N_ds[TILE_SIZE]; |
从而Shared memory的加载就更简单了:
1 | int tid = threadIdx.x + blockDim.x * blockIdx.x; |
之后就是对于每一个thread遍历卷积核中元素,乘累加。只是对于中间元素,已经存在于自己的Shared中了,访问自己的Shared;对于左右元素,访问N,实际上是访问L2 缓存。
实现与基本形式相似:
1 |
|
敲黑板
- 所有这些技术都可以用在二维,三维卷积,只不过是对存储访问的索引计算更加复杂。
- 存在对Global的重复访问,考虑使用Shared。
- shared memory在
L1缓存中。 - 考虑元素是否被缓存到
L2. - 缓存:作为名词是指在芯片内部的高速存储区域;作为动词指将其他存储空间中的内容放入高速缓存空间。[待求证]