作用是优化一个目标函数,它是一个基于搜索的数值优化算法。具体说来,当需要最小化一个损失函数,使用梯度下降;当最大化一个效用函数时,使用梯度上升发。
在线性回归中使用的是最小二乘法得到最终结果,而对于许多机器学习算法,其最小化损失函数的方法是不能使用类似最小二乘法直接求解的。此时可以考虑借鉴数值计算方法中的凸优化问题的解法。
目标函数是参数的函数,输入数据是常量。所以目的是找到目标函数取最小值时的参数。
搜索可能陷入局部最优解,解决方法有比如动量梯度下降 ,跳出局部最优值。还可以多次运行GD,每次的起始点随机化。
线性回归问题的目标有唯一的最优解,(凸优化问题)
当目标函数是凹函数时,才求最小值。目标函数对参数求导数,得到梯度。梯度表示这一点的切线斜率的值。根据参数迭代公式:当在某一点的梯度小于0时,迭代后参数值增大,即对应的目标函数值减小;当在某一点的梯度大于0时,迭代后参数值变小,即目标函数值减小。可见,不管点的位置在哪,迭代参数后,目标函数值都减小。(详见数学笔记)
模拟梯度下降 先创建一个数据集,使其图像为凹函数:
1 2 x = np.linspace(-1 , 6 , 200 ) y = (x-2.5 )**2 -1
x为参数,y为目标函数。y对x求导数:
1 2 3 def gradient (theta) : """计算梯度""" return 2 *(theta-2.5 )
对x求对应y:
1 2 3 4 5 6 def loss (theta) : """对应目标函数值""" try : return (theta-2.5 )**2 -1 except : return float('inf' )
根据迭代公式,编码:
1 2 3 4 5 6 7 8 9 10 11 learning_rate = 0.1 epsilon = 1e-8 theta = 0 theta_history = [theta] while True : grad = gradient(theta) last_theta = theta theta = theta - learning_rate * grad theta_history.append(theta) if (abs(loss(theta)- loss(last_theta)) < epsilon): break
其中,epsilon是一个很小的值,当abs(loss(theta)- loss(last_theta)) < epsilon时,表示迭代参数使得目标函数值达到最小值。为什么不是当梯度为零停止迭代呢,因为浮点数0,在计算机中不是零,这样,就本实验而言循环不会停止。
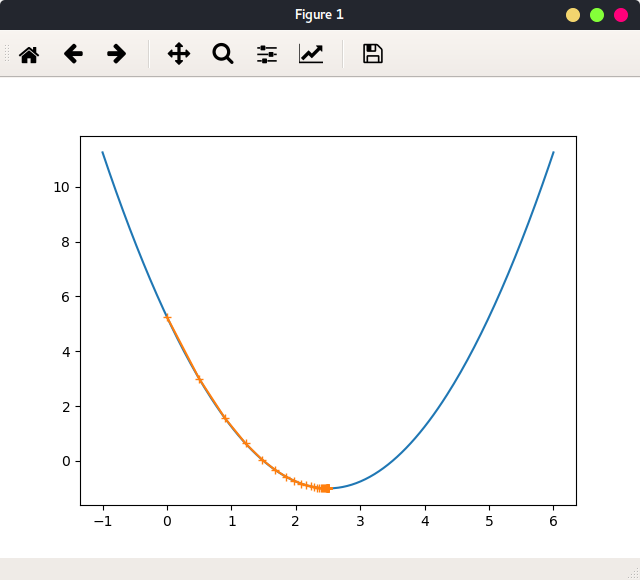
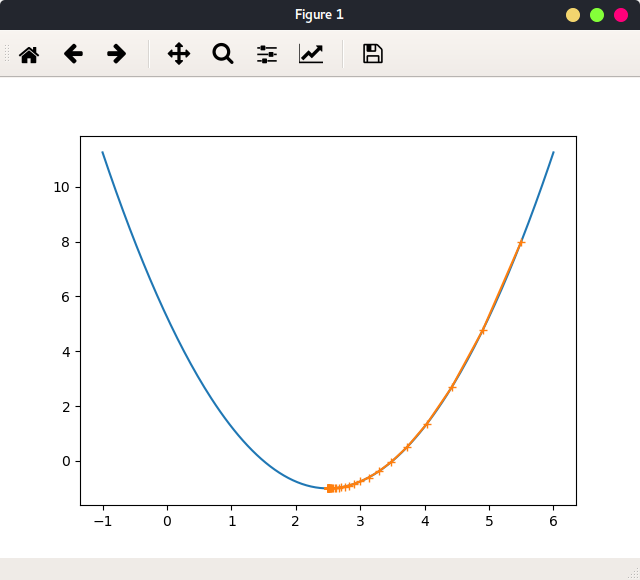
theta_history记录了每次迭代的参数值。learning_rate = 0.1,theta = 0时绘出函数图像,及参数迭代路径:
1 2 3 plt.plot(x, y) plt.plot(np.asarray(theta_history), loss(np.asarray(theta_history)), marker='+' ) plt.show()
如图:
一共迭代了46次,最终停在点(2.499891109642585, -0.99999998814289),与最小值点(2.5, -1)非常接近。这表明了算法的正确性。
当当learning_rate = 0.1,theta = 5.5时绘出函数图像,及参数迭代路径:
可以看出,不论参数初始值在哪,最终会停在最小值处。
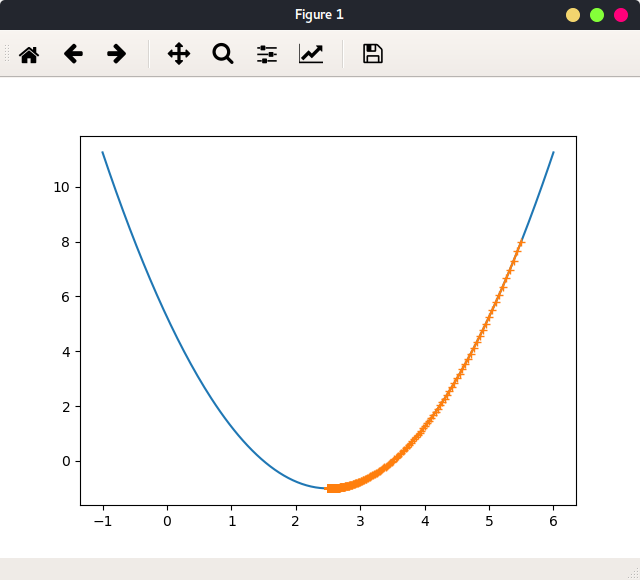
当学习率较小时:learning_rate = 0.01,theta = 5.5绘出函数图像,及参数迭代路径:
依旧停在最小值处,但是迭代次数增加到433次。
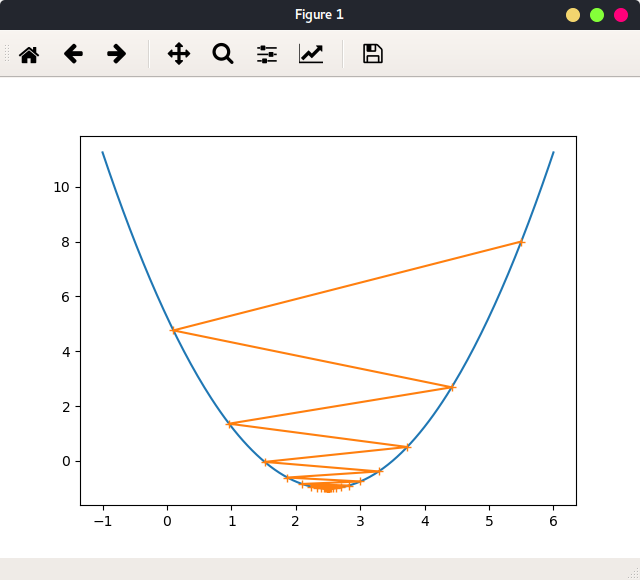
当学习率较大时:learning_rate = 0.9,theta = 5.5绘出函数图像,及参数迭代路径:
可以看出,学习率较大时,迭代路径在最优值左右震动。
为了避免迭代无止境的循环下去,设置参数n_itr,表示最大迭代次数。
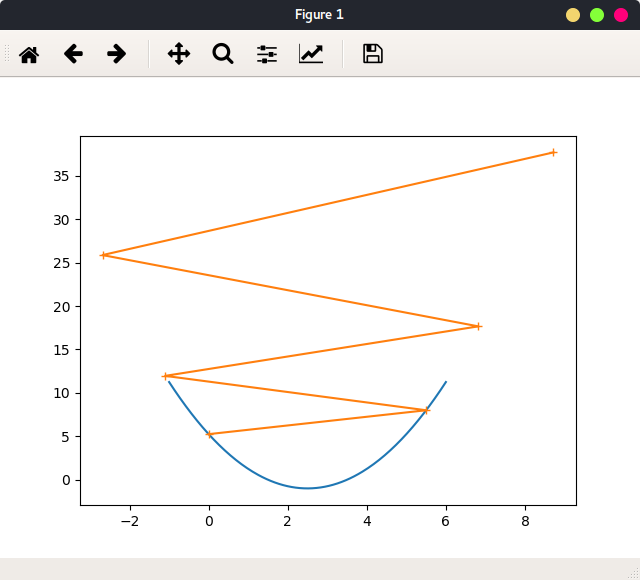
当设置学习率过大时,learning_rate = 1.1``theta = 0,n_itr=5,出现梯度上升情况,如图:
限定只迭代5次。
所以要设置最合适的学习率。
程序 以上实现过程:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 def gradient_descent (init_theta, learning_rate, n_itr, epsilon=1e-8 ) : theta = init_theta theta_history.append(theta) i_itr = 0 while i_itr < n_itr: gradient = dJ(theta) last_theta = theta theta = theta - learning_rate*gradient theta_history.append(theta) if (abs(J(theta) - J(last_theta)) < epsilon): break i_itr += 1 def plot_theta_history () : plt.plot(x, y) plt.plot(np.asarray(theta_history), J(np.asarray(theta_history)), marker='+' ) plt.show()
调用:
1 2 3 4 5 learning_rate = 0.1 theta_history = [] gradient_descent(0 , learning_rate, 5 ) plot_theta_history()
多元线性回归的GD python数据行为 创建一个一维向量:
1 2 np.random.seed(123 ) x1 = 2 * np.random.random(size=100 )
x1的内容如下:
1 [ 1.39293837 0.57227867 0.45370291 ... 1.10262954 1.43893794 ]
x1是一个长度为100的一维向量。向量每个元素为一个标量。用 同样的方式在创建一个等长度的一维向量x2:
1 x2 = 3 * np.random.random(size=100 )
假如变量y由x1和x2共同决定:
1 y = x1 * 3 + x2 * 4 + (5 + np.random.normal(size=100 ))
此时x1和x2作为输入样本的两个特称,现在把两者合并在一起:
返回一个二维向量,每一个元素为一个长度为1的一维向量,每一个元素表示一个样本:
1 2 3 4 5 6 7 [[ 1.39293837] [ 0.57227867] [ 0.45370291] ... [ 1.10262954] [ 1.43893794] [ 0.84621292]] 100X1
第二步,将两个特征合并在一起:
1 X = np.hstack([x1.reshape(-1 , 1 ), x2.reshape(-1 , 1 )])
返回X为一个二维向量,这个向量的每个元素为一个样本,每个样本由两个值表达:
1 2 3 4 5 6 7 [[ 1.39293837 1.53938446] [ 0.57227867 1.99987365] [ 0.45370291 0.31772546] ... [ 1.10262954 0.39268485] [ 1.43893794 0.96594182] [ 0.84621292 1.98469301]] 100X2
因为y的组成还有一个常量,可以用x0表示,x0恒为1,并且把x0也X中:
1 X_b = np.hstack([np.ones((len(X), 1 )), X])
返回X_b 中每个元素由3个值决定:
1 2 3 4 5 6 7 [[ 1. 1.39293837 1.53938446] [ 1. 0.57227867 1.99987365] [ 1. 0.45370291 0.31772546] ... [ 1. 1.10262954 0.39268485] [ 1. 1.43893794 0.96594182] [ 1. 0.84621292 1.98469301]] 100X3
现在可以看看X_b 的属性:
1 2 3 4 print(type(X_b)) print(X_b.shape) print(X_b.shape[0 ]) print(X_b.shape[1 ])
返回:
1 2 3 4 <class 'numpy.ndarray'> # 是一个 numpy.ndarray 对象 (100, 3) # 矩阵 100行 3列 100 # 外维度 100 3 # 内维度 3
100行表示,一共有100个样本,3列表示每个样本有3个特征。
因为此时X_b是一个矩阵,所以还可以对X_b进行切片操作,就是取它是一部分:
1 2 3 print(X_b[0 , :]) [ 1. 1.39293837 1.53938446 ]
取所有行,索引是0和1的列:
1 2 3 4 5 6 7 8 9 print(X_b[:, 0 :2 ]) [[ 1. 1.39293837 ] [ 1. 0.57227867 ] [ 1. 0.45370291 ] ... [ 1. 1.10262954 ] [ 1. 1.43893794 ] [ 1. 0.84621292 ]] 100 X2
其他函数的用法:np.ones((4, 2)):创建矩阵4行2列。
dot() .dot() 是numpy.ndarray对象的方法,实例:X_b是100X3的矩阵,theta为长为3的向量,y为长度为100 的向量,则:
X_b.dot(theta) 结果为长度为100 的向量。y - X_b.dot(theta)结果为长度为100的向量。(y - X_b.dot(theta))**2 结果为长100 的向量。平方差。
np.sum((y - X_b.dot(theta))**2) 结果为100个数就和。 平方差之和。np.sum((y - X_b.dot(theta))**2) / len(X_b) 就是MSE。
对象.dot(参数)中对象是一个矩阵,它的每一行代表一个样本,所有行表示所有样本。参数是一个向量,这个向量中每一个值分别与对象的每一行的每个值相乘后相加,最后得到一个与参数大小一样的向量。
BGD算法过程 目标:最小化loss:
1 2 3 4 5 6 def loss (theta, X_b, y) : """目标函数""" try : return np.sum((y - X_b.dot(theta))**2 ) / len(X_b) except : return float('inf' )
迭代过程中需要求梯度:
1 2 3 4 5 6 7 def gradient (theta, X_b, y) : """loss对参theta的梯度""" res = np.empty(len(theta)) for i in range(0 , len(theta)): res[i] = (X_b.dot(theta) - y).dot(X_b[:, i]) return res * 2 / len(X_b)
其中res[i]的值所用公式见数学笔记。
GD的过程如下,输入样本X_b已知, y表示真是拟合值,只需要初始化参数theta就可执行GD。init_theta = np.zeros(X_b.shape[1]) 初始值为0。
1 2 3 4 5 6 7 8 9 10 11 12 13 def gradient_descent (X_b, y, init_theta, learning_rate=0.01 , n_itr=1000 , epsilon=1e-8 ) : theta = init_theta i_itr = 0 while i_itr < n_itr: grad = gradient(theta, X_b, y) last_theta = theta theta = theta - learning_rate*grad if (abs(loss(theta, X_b, y) - loss(last_theta, X_b, y)) < epsilon): break i_itr += 1 return theta
调用GD:
1 2 3 4 theta = gradient_descent(X_b, y, init_theta, learning_rate=0.01 , 2000 ) 得到迭代最终的参数theta: [ 5.09735976 2.81188565 4.01306057 ]
结果分别对应(5 + np.random.normal(size=100),3,4。
其中,对于求梯度,观察式子,发现可以使用向量化 实现:
1 2 3 def gradient_vectorize (theta, X_b, y) : """向量化""" return X_b.T.dot(X_b.dot(theta)-y) * 2 /len(X_b)
归一化 当样本的每种特征数值量级差别很大时:
1 2 3 4 [ 6.32000000e-03 1.80000000e+01 2.31000000e+00 0.00000000e+00 5.38000000e-01 6.57500000e+00 6.52000000e+01 4.09000000e+00 1.00000000e+00 2.96000000e+02 1.53000000e+01 3.96900000e+02 4.98000000e+00]
使用一般的步长,得到的结果在python中为nan。因为特征数值相差太大时,一般的步长也变得很大很大(步长对数据特征值之差敏感)。此时减小步长,增加迭代次数也就可以达到结果,但效率很低。
所以使用梯度算法前,要对数据进行归一化。
SGD 随机梯度下降法,每次处理一个样本,马上计算一次梯度(见数学笔记)。与BGD相比,SGD的loss函数改变了:所有样本带入目标函数后的结果 (看公式)。而SGD的loss是把当前这一个样本带入目标函数的结果 。
所以,BGD的参数迭代路径的方向是由所有样本决定,是实际方向。而SGD的参数路径是曲折的,因为每一步只是由一个样本得到,这个方向不能代表所有样本的实际方向。
SGD一般设置学习率为变化值。learning_rate = a / (itr+b)。
SGD实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 def gradient_vectorize (theta, X_b_i, y_i) : """每一个样本的梯度""" return X_b_i.T.dot(X_b_i.dot(theta)-y_i) * 2 def SGD (X_b, y, init_theta, n_itr) : t0 =5 t1 = 50 def learning_rate (t) : return t0/(t+t1) theta = init_theta for itr_i in range(n_itr): curr_sample_id = np.random.randint(len(X_b)) grad = gradient_vectorize(theta, X_b[curr_sample_id], y[curr_sample_id]) theta = theta - learning_rate(itr_i) * grad return theta
敲黑板
本篇笔记的GD算法是一次性把所有样本带入,也就是遍历一遍所有样本才更新一次参数。称为BGD
向量化速度快
与步长有关的迭代算法,首先要对数据进行归一化。
常用python函数
BGD和SGD的loss函数是不同的,BGD在迭代过程中目标函数不变,而SGD的loss随每个样本而改变。